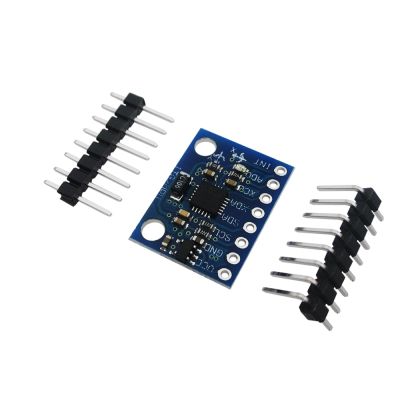
โมดูล MPU6050 6แกนเครื่องมือวัดการหมุนวน DMP เครื่องตัวกรองคาลมานเครื่องวัดความเร่ง STM32โมดูลยานพาหนะแบบทรงตัวได้การเอียงตัว
ไฮไลท์:
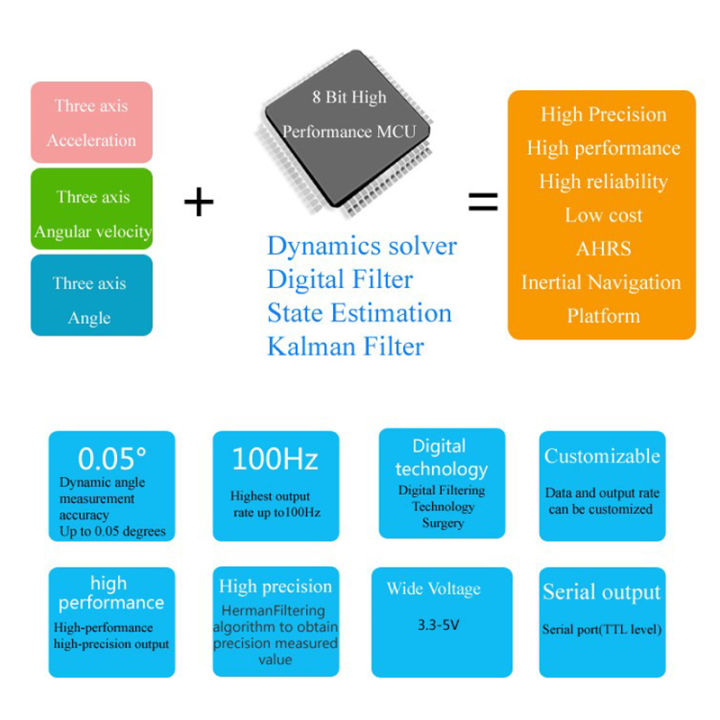
1.โมดูลนี้รวมตัวแก้ไขท่าทางด้วยอัลกอริทึมตัวกรองคาลมานแบบไดนามิกสามารถส่งออกท่าทางปัจจุบันของโมดูลในสภาพแวดล้อมแบบไดนามิกได้อย่างแม่นยำความแม่นยำในการวัดท่าทางอยู่ที่0.01องศาความเสถียรสูงมากและประสิทธิภาพก็ดีกว่าเครื่องมือที่มีมุมเอียงแบบมืออาชีพ!
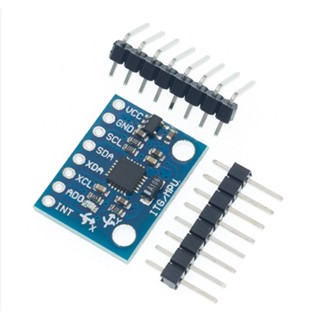
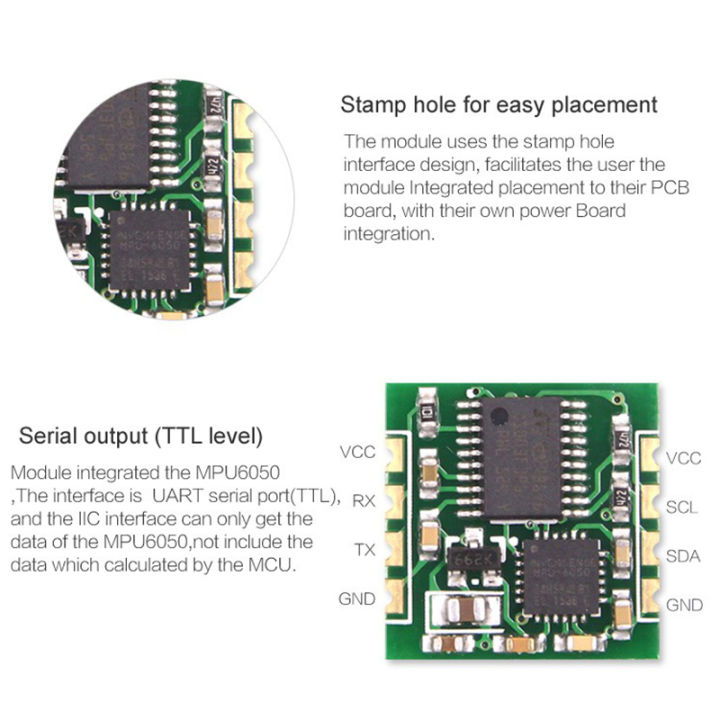
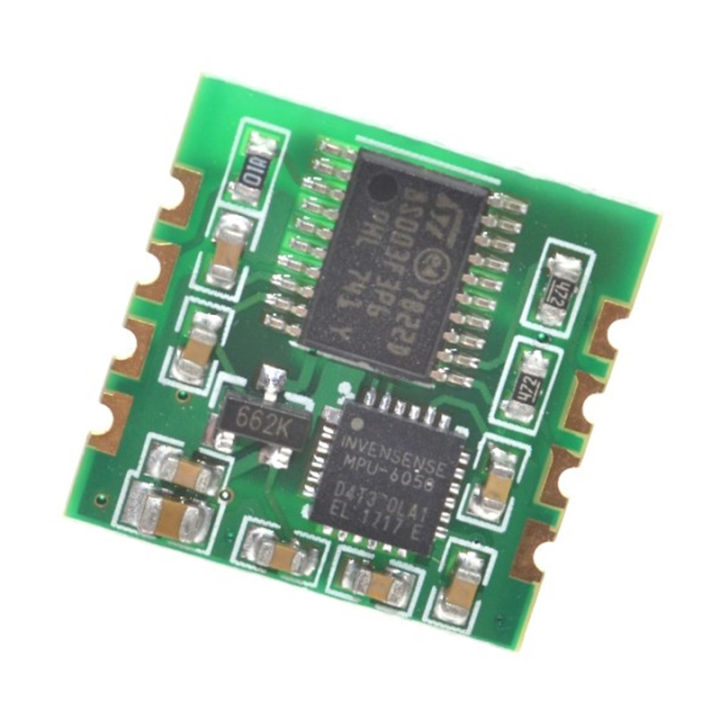
2.โดยใช้ MPU6050เครื่องวัดความเร่งไจโรที่มีความแม่นยำสูงข้อมูลการวัด MPU6050จะถูกอ่านผ่านโปรเซสเซอร์แล้วส่งออกผ่านพอร์ตอนุกรมทำให้ผู้ใช้ไม่จำเป็นต้องพัฒนาโปรโตคอล I2C ที่ซับซ้อนของ MPU6050.
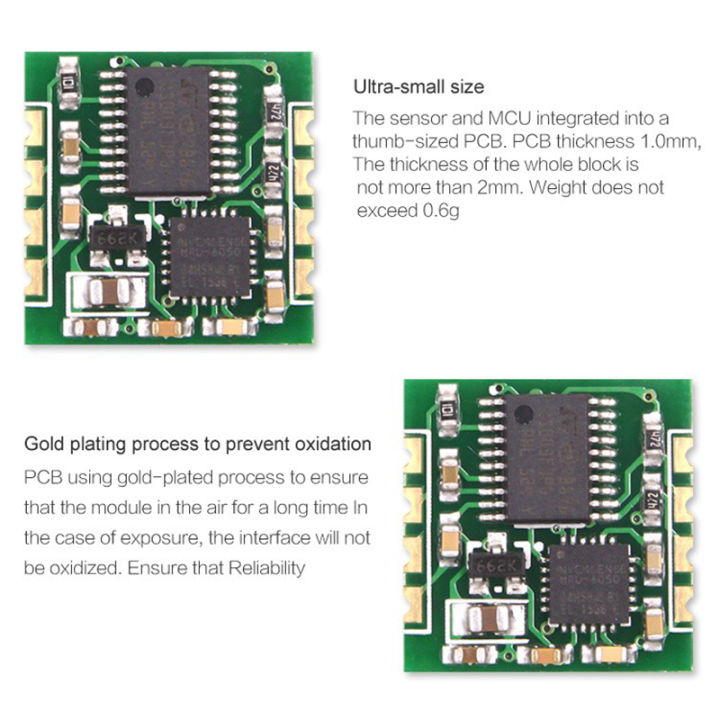
3.รูปแบบ PCB อย่างระมัดระวังและกระบวนการทำให้มั่นใจได้ว่า MPU6050ได้รับการรบกวนจากภายนอกเพียงเล็กน้อยและมีความแม่นยำในการวัดสูง
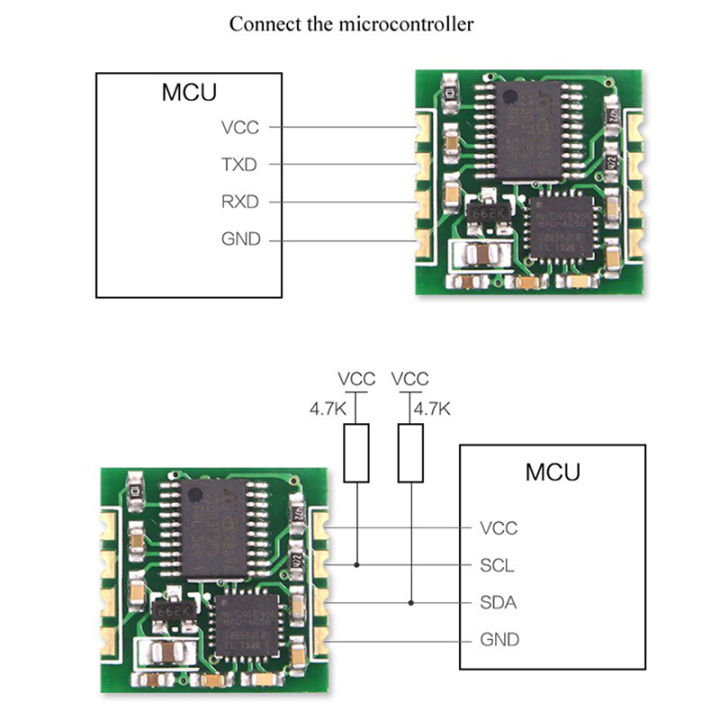
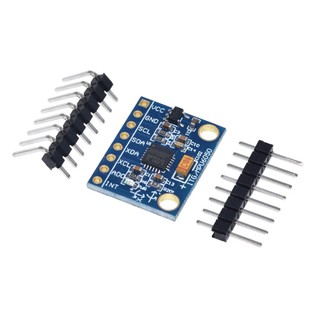
4.โมดูลมีวงจรป้องกันแรงดันไฟฟ้าของตัวเองซึ่งเข้ากันได้กับระบบฝังตัว3.3V/5V และง่ายต่อการเชื่อมต่อ
5.โมดูลนี้ยังคงรักษาส่วนต่อประสาน I2C ของ MPU6050พบกับความต้องการของผู้ใช้ที่ต้องการเข้าถึงข้อมูลการวัดด้านล่าง
6.การใช้เทคโนโลยีการกรองดิจิทัลขั้นสูงสามารถลดเสียงรบกวนในการวัดได้อย่างมีประสิทธิภาพและเพิ่มความแม่นยำในการวัด
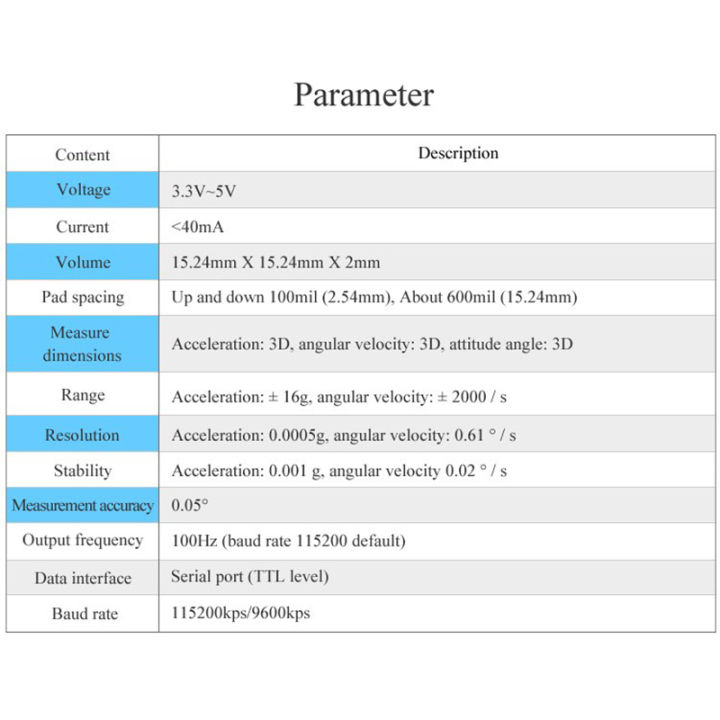
พารามิเตอร์:
1.แรงดันไฟฟ้า: 3V ~ 6V
2.ปัจจุบัน: <10mA
3.ปริมาตร: 15.24มม. x 15.24มม. x 2มม.
4.ระยะห่างของแผ่น: 100mil ขึ้นและลง (2.54มม.) 600mil ซ้ายและขวา (15.24มม.)
5.ขนาดการวัด: ความเร่ง: 3มิติ, ความเร็วเชิงมุม: 3มิติ, มุมทัศนคติ: 3มิติ
6.ช่วง: ความเร่ง: ± 16กรัม, ความเร็วเชิงมุม: ± 2000 °/s.
7.ความละเอียด: ความเร่ง: 6.1e-5กรัม, ความเร็วเชิงมุม: 7.6e-3 °/s.
8.ความเสถียร: ความเร่ง: 0.001กรัมความเร็วเชิงมุม0.02 °/วินาที
9.ความมั่นคงของการวัดทัศนคติ: 0.01 °
10.ความถี่ข้อมูลส่งออกคือ100Hz (115200อัตราบอด)/20Hz (9600อัตราบอด)
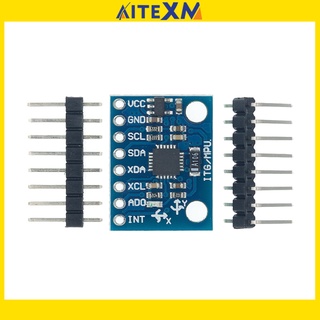
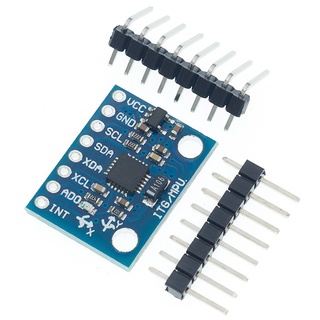
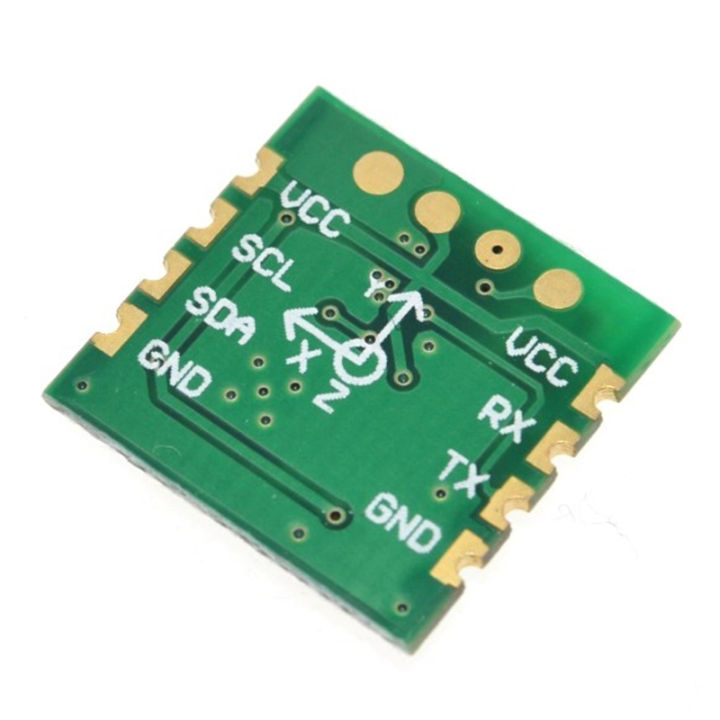
11. อินเทอร์เฟซข้อมูล: พอร์ตอนุกรม (ระดับ TTL), I2C (ต่อตรงต่อ MPU6050, ไม่มีเอาต์พุตทัศนคติ)
10.อัตราบอดคือ115200kps/9600kps






































![[สงสัย] โมดูลจิ๊กแบบตารางฉีกบางๆตัวจัดตำแหน่งตัววัดตำแหน่งการตัด](https://lzd-img-global.slatic.net/g/p/5d9cf3e321715b74722bba76a67f2e26.jpg_400x400q80.jpg)
