1. เทคโนโลยีที่เงียบเป็นพิเศษ: StealthChop2 (เทคโนโลยีที่เงียบเป็นพิเศษ) สามารถขับเคลื่อนมอเตอร์ให้ทำงานได้ในสภาพที่เงียบมากและสามารถควบคุมเสียงของมอเตอร์ให้ต่ำกว่า 10dB และเสียงรบกวนต่ำกว่ามาก วิธีการควบคุมกระแสแบบดั้งเดิม
2. เครื่องบดสับแบบไดนามิกสูง: โหมดสับ SpreadCycle PWM กำหนดค่าฟังก์ชันการสลายตัวของไฮสเตอรีซิสโดยอัตโนมัติก่อนเครื่องลดแรงตึงช้าและรวดเร็ว กระแสเฉลี่ยจะสะท้อนให้เห็นถึงกระแสปกติของการกำหนดค่าและจะไม่มีช่วงเวลาการเปลี่ยนแปลงเมื่อคลื่นไซน์ข้ามจุดศูนย์ซึ่งจะช่วยลดความผันผวนของกระแสและแรงบิดทำให้รูปคลื่นปัจจุบันใกล้ชิดกันมากขึ้น ไปไซน์เวฟค่ะ เมื่อเทียบกับเครื่องบดสับแบบเดิมมอเตอร์สับ SpreadCycle PWM ภายใต้การควบคุมโหมดคลื่นจะทำงานได้อย่างราบรื่นและราบรื่นยิ่งขึ้น
3. การสร้างความร้อนขนาดเล็ก: เมื่อเทียบกับโมดูลไดรฟ์มอเตอร์สเต็ปเปอร์ TMC2100 โมดูลไดรฟ์ TMC2208 จะสร้างความร้อนน้อยลง ผลการสร้างความร้อนของ TMC2208 ที่ประมาณ 0.8A เทียบเท่ากับ 2100 ที่ 0.5A และสามารถใช้แทนกันกับ TMC2100
ค่าขั้นตอนไดรฟ์ TMC2208 คำนวณตาม 16 แผนกย่อย และชิปใช้อัลกอริทึมที่แตกต่างเพื่อขยาย 16 แผนกย่อยเป็น 256 แผนกย่อย
เคล็ดลับ: ต้องคำนวณค่าขั้นตอนการตั้งค่า TMC2208 ตามจำนวนการแบ่งย่อยที่คุณตั้งไว้ เพื่อให้ได้มอเตอร์ขับเคลื่อนที่เงียบและราบรื่นชิปขับใช้อัลกอริทึมการสอดแทรกเพื่อประมาณผลกระทบของ 256 การแบ่งย่อย อย่าสนใจว่าชิปใช้อัลกอริทึมใดตราบใดที่คุณรู้ว่ามีจำนวนการแบ่งย่อยที่คุณเลือกและคุณสามารถคำนวณค่าขั้นตอนตามแผนกย่อยที่คุณตั้งไว้
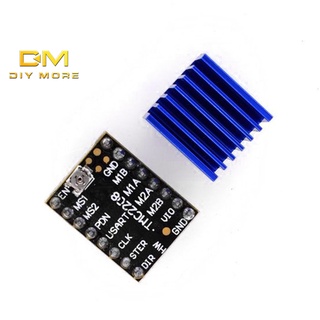
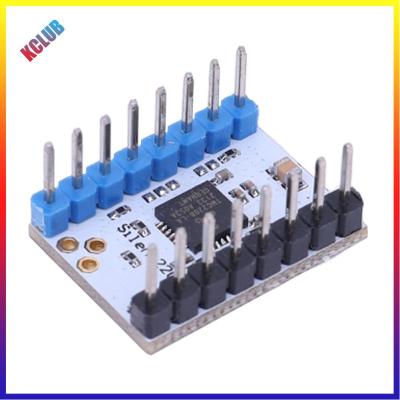
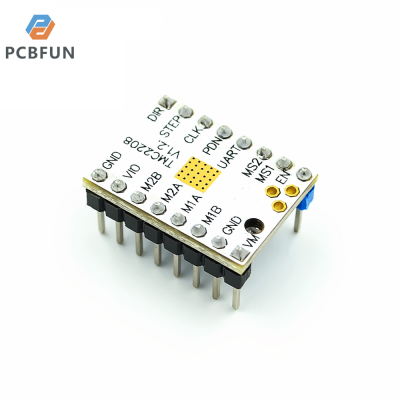
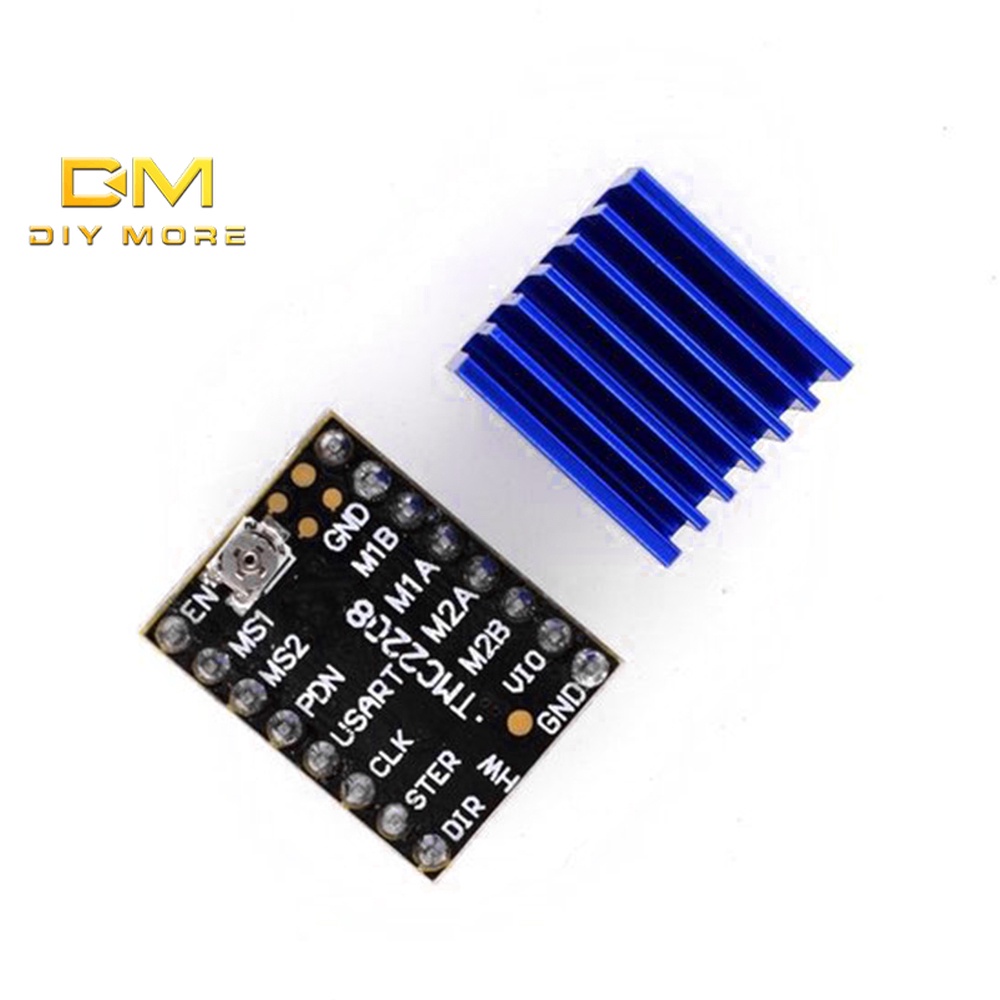
4. รุ่นชิป: TMC2208
5. ใช้วัสดุคุณภาพสูงรับประกันคุณภาพพารามิเตอร์ผลิตภัณฑ์:
กระแสไฟขาออกสูงสุด 1.4A
กระแสไฟฟ้าที่แนะนำ: สูงสุด 1.2A
โรงงานเริ่มต้นปัจจุบัน: 0.7A
Microstepping: การแบ่งย่อย 256 microstepping
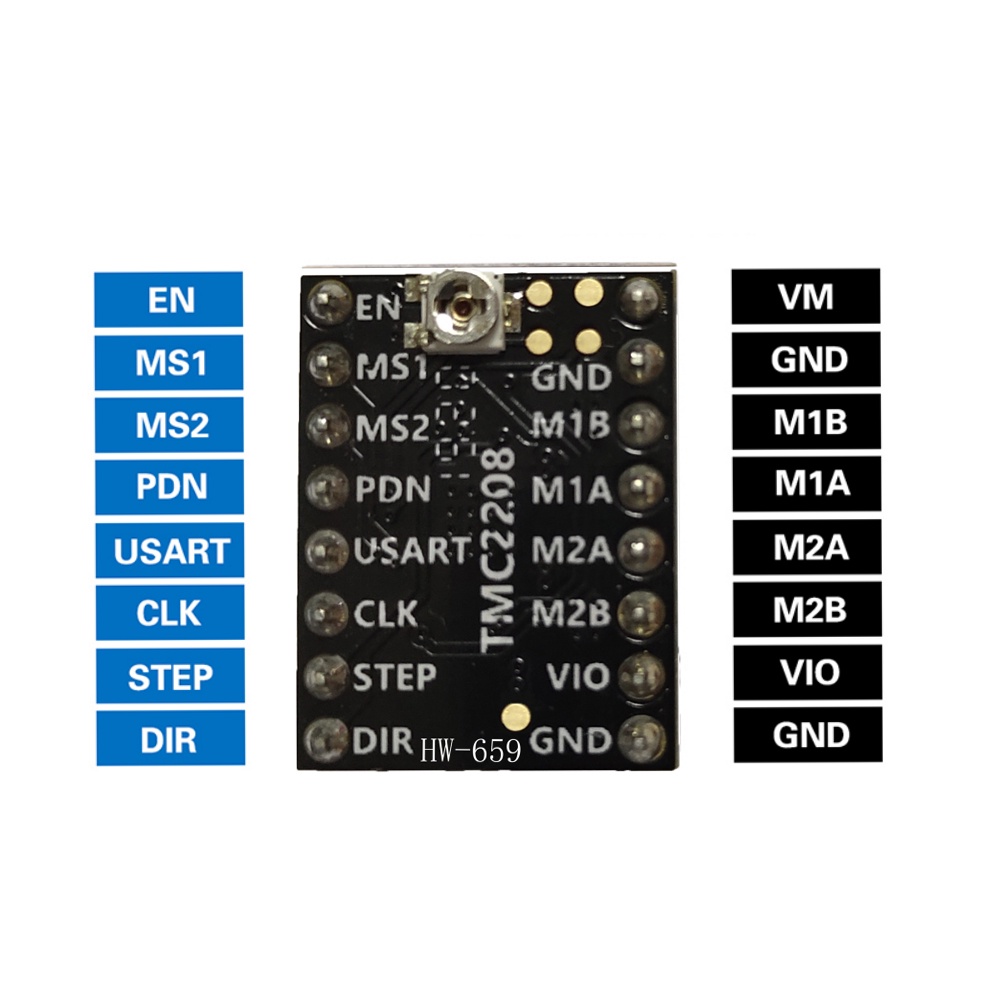
การกำหนดค่า: ขั้นตอน / DIR หรือ UART
ช่วงการขับขี่โหลด: 5-36V
แรงดันไฟฟ้าที่ใช้งานตรรกะ IC: 3.3V / 5v คำแนะนำผลิตภัณฑ์:
1. เมื่อใช้กับแผงควบคุมเครื่องพิมพ์โปรดเก็บฝาจัมเปอร์ 3 อันไว้ใต้ซ็อกเก็ต
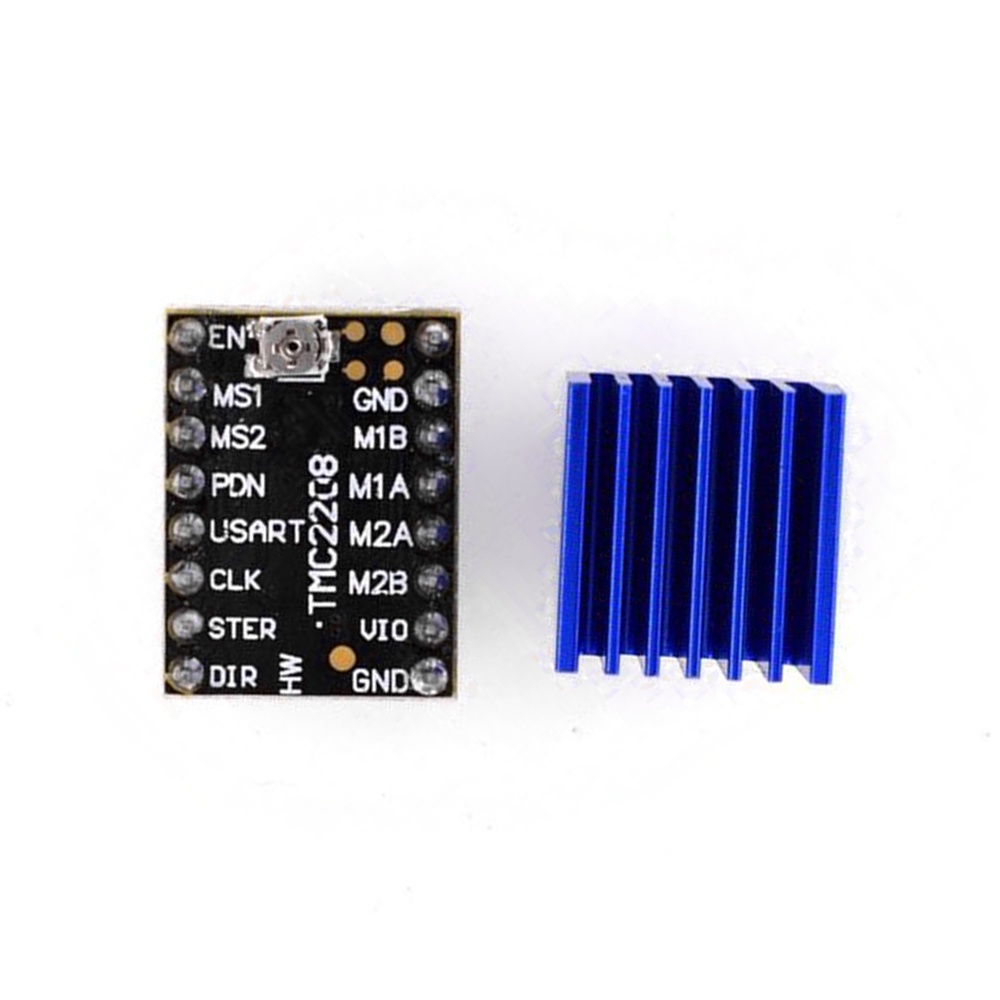
2. แผ่นระบายความร้อนติดโดยตรงกับ PCB โปรดใส่ใจกับทิศทางของแผ่นระบายความร้อนมิฉะนั้นจะทำให้เกิดความร้อนและหมุดเชื่อมต่อเข้าด้วยกันและทำให้เกิดไฟฟ้าลัดวงจร
3. ทิศทางของมอเตอร์ตรงข้ามกับ 4988 และ 8825 หากคุณต้องการเปลี่ยน 4988 โดยตรงโปรดปรับเฟิร์มแวร์หรือปรับการเชื่อมต่อมอเตอร์ เมนบอร์ดล็อตโต้สามารถกำหนดทิศทางมอเตอร์ในหน้าจอสัมผัสได้โดยตรงอัลกอริทึมและระเบียบปัจจุบันของไดรฟ์
1. Vref วัด Gnd และแรงดันไฟฟ้าที่ปลายตรงกลางของโพเทนชิออมิเตอร์
2. อย่าลืมเชื่อมต่อมอเตอร์เมื่อวัดแรงดันไฟฟ้ามิฉะนั้นไดรฟ์จะไหม้ได้ง่าย
3. เชื่อมต่อแหล่งจ่ายไฟเมื่อวัดแรงดันไฟฟ้าไม่ใช่แค่เชื่อมต่อแหล่งจ่ายไฟ USB
4. โปรดใส่ใจกับทิศทางเป็นพิเศษอย่าใส่กลับเข้าไปใหม่!

![[ElectronicMall01.th] Tmc2208 V1.2 บอร์ดไดร์เวอร์สเต็ปเปอร์ 4.75V-36V Peak 2A สําหรับเครื่องพิมพ์ 3D](https://down-th.img.susercontent.com/file/sg-11134201-7rbk0-lkyz51luk6ywbe_tn)







![[armani1.th] Tmc2208 V1.2 สเต็ปมอเตอร์ไดร์เวอร์ 4.75V-36V สําหรับเครื่องพิมพ์ 3D](https://down-th.img.susercontent.com/file/sg-11134201-7rbn6-llbs66q3vqngac_tn)















![[aigoni.th] Tmc2208 V1.2 สเต็ปมอเตอร์ไดร์เวอร์ 4.75V-36V สําหรับเครื่องพิมพ์ 3D](https://down-th.img.susercontent.com/file/sg-11134201-7r98o-lkjis7burlpq8f_tn)
![[Dcline.th] Tmc2208 V1.2 สเต็ปมอเตอร์ไดร์เวอร์ 4.75V-36V สําหรับเครื่องพิมพ์ 3D](https://down-th.img.susercontent.com/file/sg-11134201-7rbl6-llegi0en74ilf9_tn)
![[ErudentT] โมดูลสเต็ปเปอร์มอเตอร์ไดรเวอร์ DC 12v ULN2003 สําหรับ arduino [ใหม่]](https://down-th.img.susercontent.com/file/sg-11134201-7rbn7-llkbx2rxriaa4c_tn)




