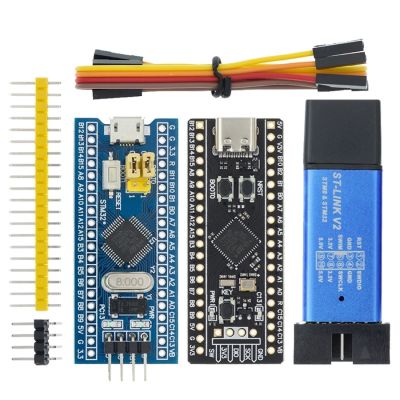
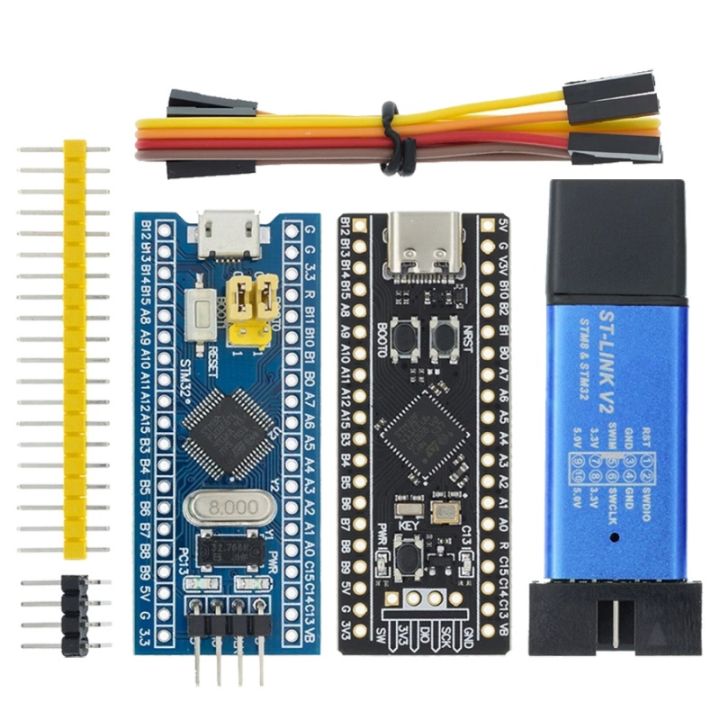
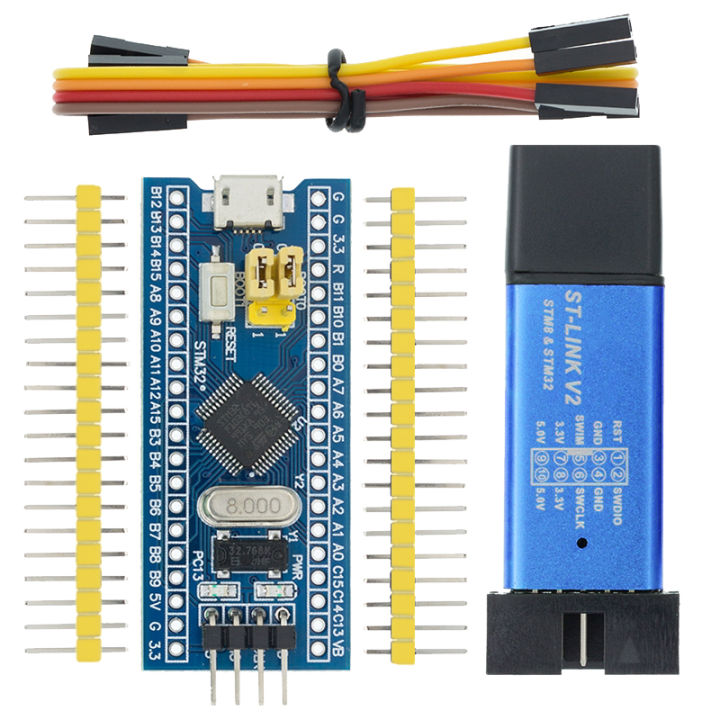
ST-Link V2มินิ STM8จำลองดาวน์โหลด
ข้อมูลจำเพาะของ
แรงดันไฟฟ้า LInput (USB): 5V
แรงดันไฟฟ้าขาออก: 3.ค่าาา3V, 5V
อินเทอร์เฟซ: ว่ายน้ำ,SWD
ขั้วต่อ: USB, 10ขา (ชนิด Molex)
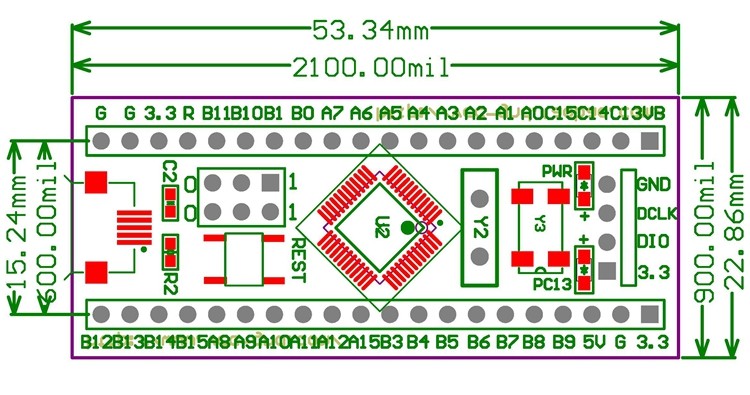
L ขนาด: 57มม. X 20มม. X 8มม. [2.2in X 0.7in X 0.3in]
โปรแกรมเมอร์ St Link V2รองรับไมโครคอนลเลอร์ STM8และ STM32
โมดูลรองรับการอัปเกรดเฟิร์มแวร์อัตโนมัติเพื่อให้แน่ใจว่าการบำรุงรักษาผลิตภัณฑ์ ST เฟิร์มแวร์โรงงานได้รับการอัปเดตเป็นเวอร์ชันล่าสุด V2.J17.S4
ส่วนหัว2X5ตัวห่างกัน2.54มม. (0.1นิ้ว) รวมสายเคเบิล (สายจัมเปอร์ F-F 4เส้น)
อินเทอร์เฟซที่รองรับ USB 2.0ความเร็วสูง
LWARNING: ชิป STM32ทำงานบน3.3V บอร์ดฝ่าวงล้อมส่วนใหญ่จะรวมตัวควบคุมแรงดันไฟฟ้าเพื่อให้สามารถขับเคลื่อนจาก USB และดองเกิล STLink จะให้พิน VCC A3.3V เพื่อเปิดชิป
L อย่าเชื่อมต่อบอร์ดกับพีซีโดยใช้ USB ในขณะที่ชิปเปิดใช้งานโดยใช้โปรแกรมเมอร์ ST-Link V2!
เชื่อมต่อกันแต่ไม่พร้อมกัน ST-Link V2 Dongle มีพิน5V เช่นกันจะไม่ถูกใช้เพราะชิป STM32ทนต่อ Not5V ขา3.3V ต้องใช้เท่านั้น
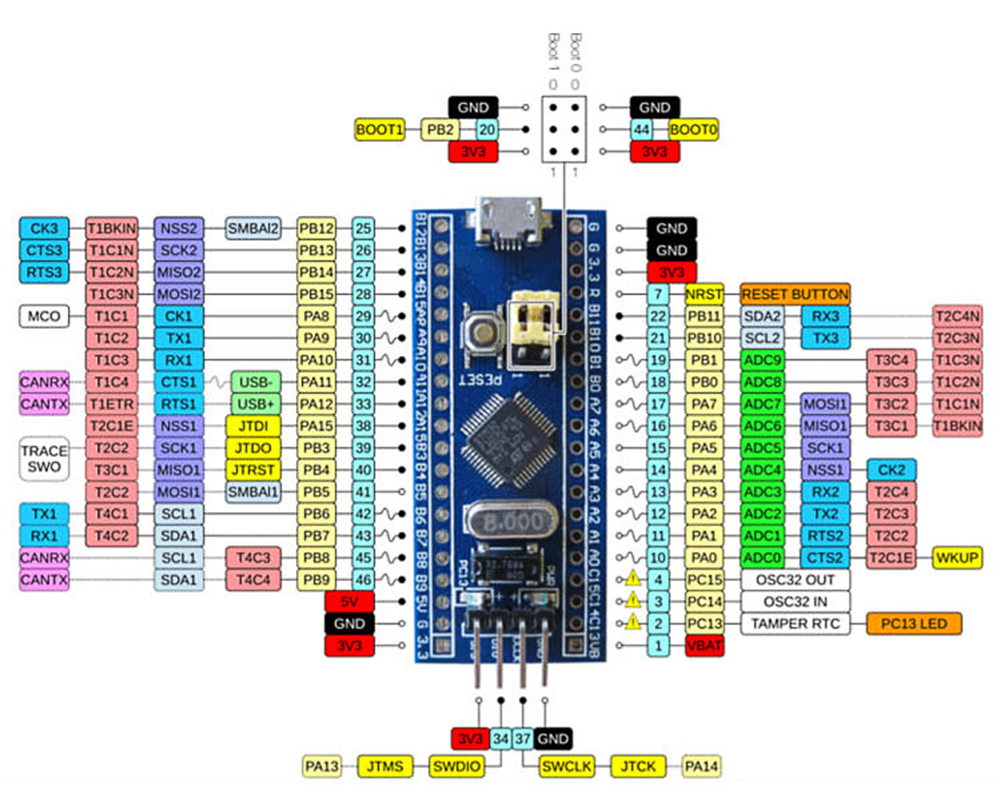
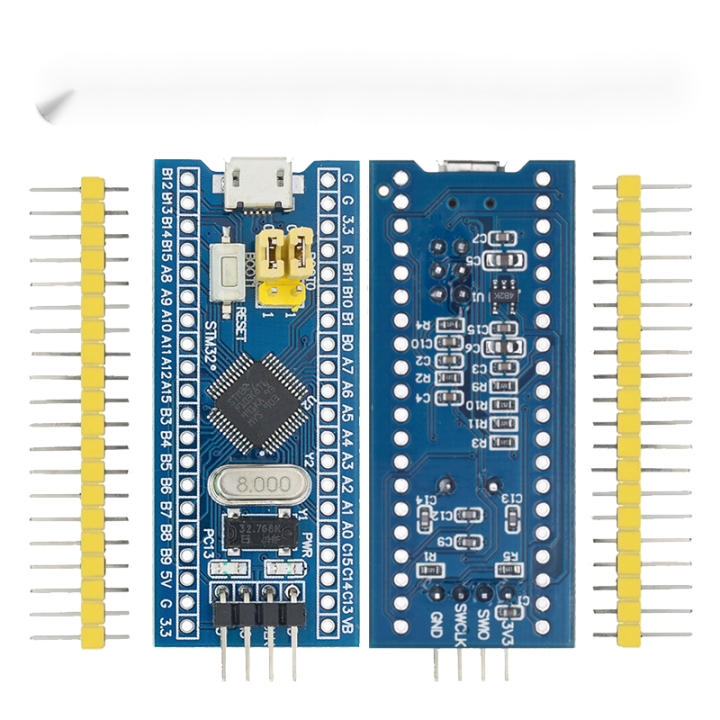
พินเอาท์
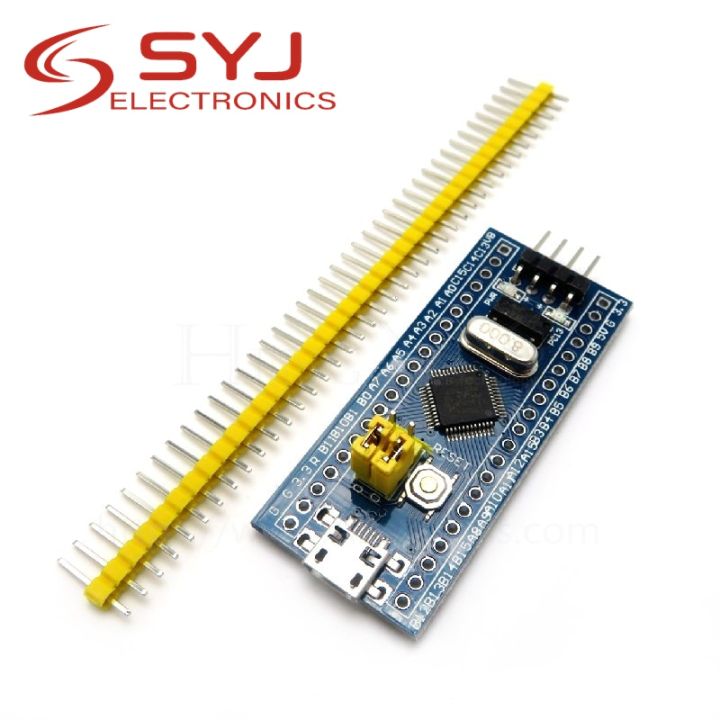
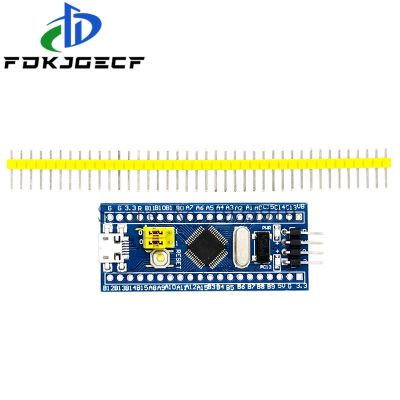
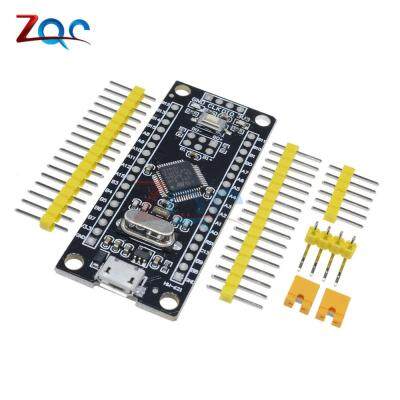
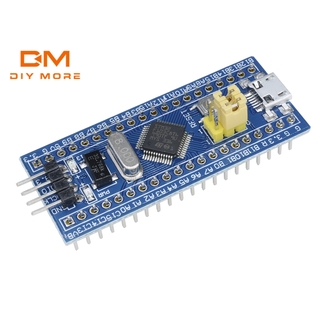
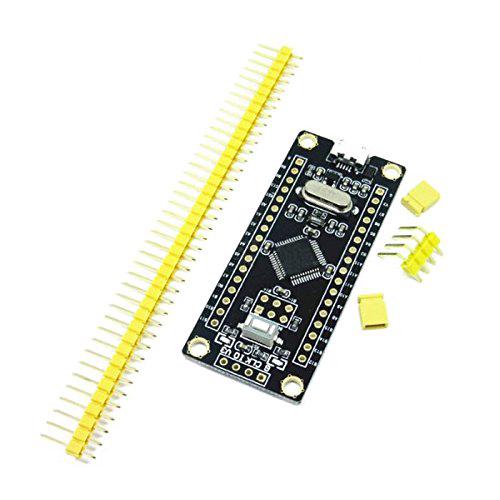
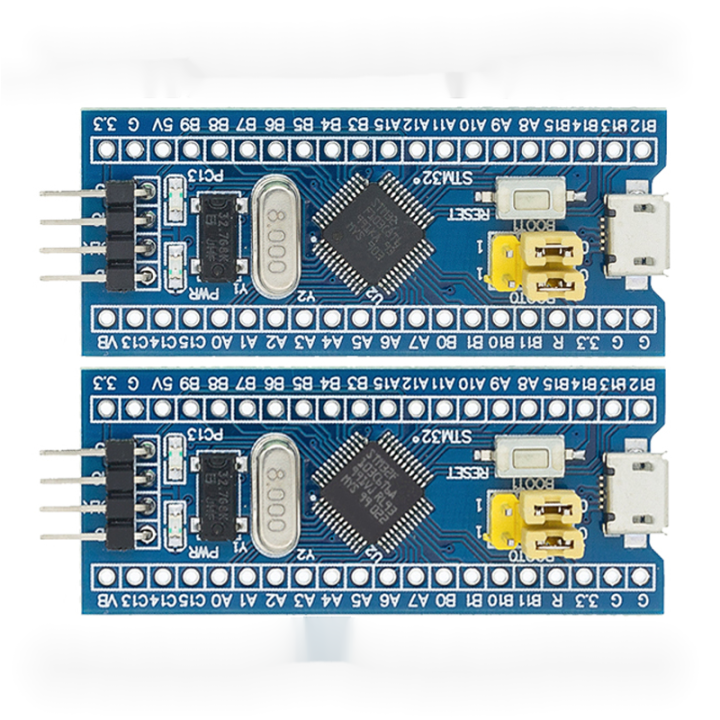
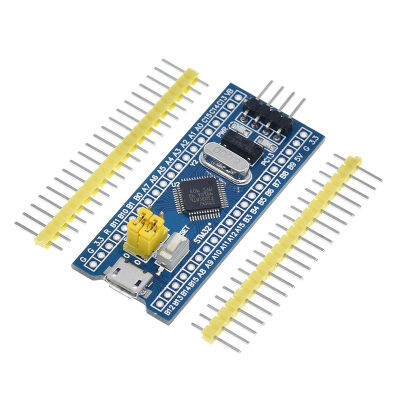
STM32F103C8T6ARM STM32โมดูลบอร์ดพัฒนาระบบขั้นต่ำสำหรับ Arduino
นี่คือชิปหลักที่ใช้สำหรับ CS32F103C8T6 ARM Core Board คุณสมบัติมีดังนี้:
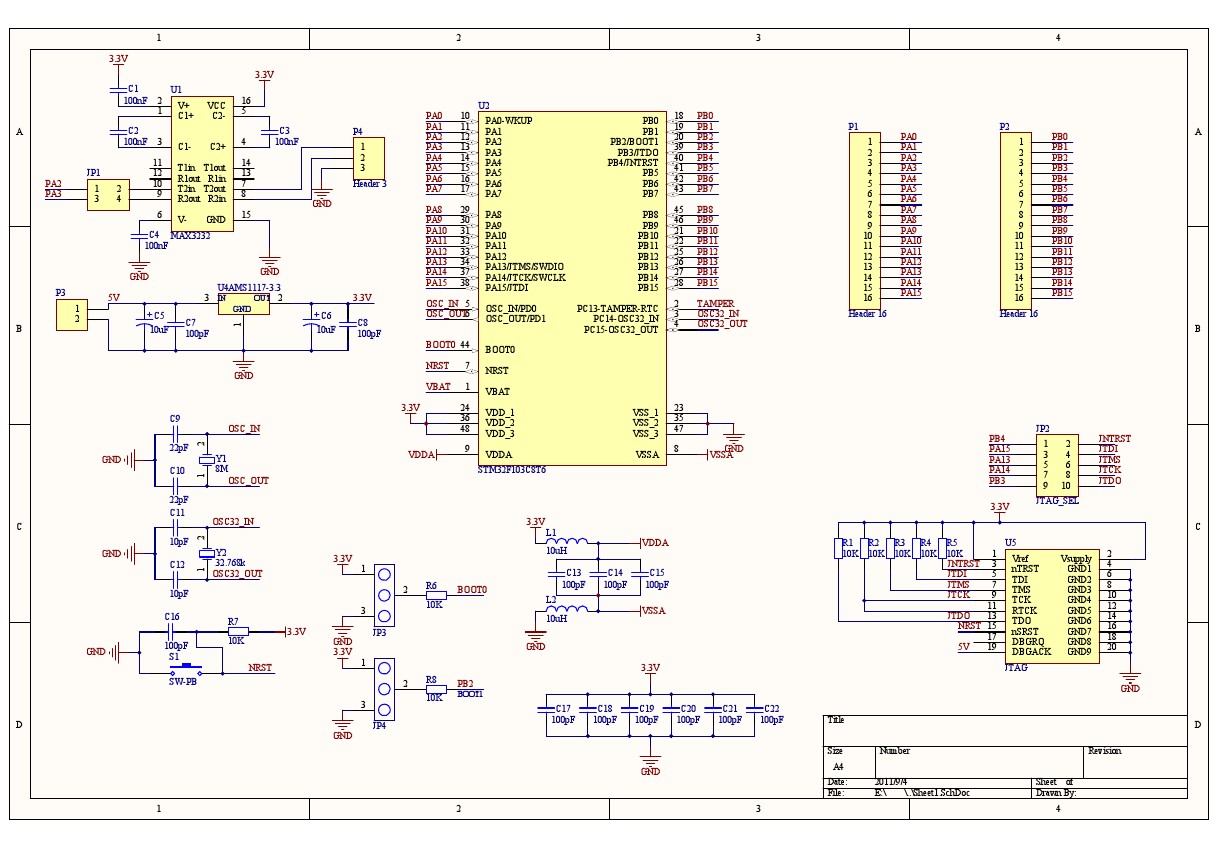
1,บอร์ดขึ้นอยู่กับวงจร MCU พื้นฐานที่สุด,วงจรคริสตัล8M และ32768,วงจรจ่ายไฟ USB
2บอร์ดหลักแบ่งออกเป็นสองแถวนำไปสู่พอร์ต I/o ทั้งหมด
3ด้วยอินเทอร์เฟซการดาวน์โหลดดีบักจำลอง SWD ง่ายและสะดวกความเร็วในการดีบัก
4,การใช้อินเตอร์เฟซ Mirco USB,คุณสามารถทำการสื่อสาร USB และแหล่งจ่ายไฟ,อินเตอร์เฟซ USB,เข้ากันได้กับสามัญแอนดรูชาร์จศัพท์มือถืออินเตอร์เฟซ
6,แบรนด์ RTC Crystal Epson,ง่ายต่อการเริ่มต้น,มีเสถียรภาพมากขึ้น
7ด้วยพินคู่แต่พินไม่เริ่มต้นการเชื่อมผู้ใช้ตามสถานการณ์การใช้งานของตนเองเพื่อเลือกทิศทางการเชื่อมของตนเองหากต้องการเชื่อมโปรดแจ้งเจ้าของ
Keil สามารถใช้ในการรวบรวมคอมไพเลอร์ IAR สามารถดาวน์โหลดได้ผ่านขั้นตอน J-Link หรือ USART1ขั้นตอนเป็นเจ้าของและขั้นตอนการแก้จุดบกพร่องมีปัญหาสามารถปรึกษาเจ้าของได้
คำอธิบายชิป:
1, 32F103C8T6
ประเภทแพคเกจ: LQFP;
จำนวนหมุด: 48;
เคอร์เนล: Cortex-M3;
ความถี่ในการทำงาน: 72MHz;
ทรัพยากรการจัดเก็บข้อมูล: แฟลช64K ไบต์,SRAM 20KByte;
ทรัพยากรอินเทอร์เฟซ: 2x SPI, 3x USART,I2C 2x,1x CAN,พอร์ต I/o,
การแปลงอนาล็อกเป็นดิจิตอล: 2x ADC (12บิต/16ช่อง)
ตัวจับเวลา: ตัวจับเวลาทั่วไป3ตัวและตัวจับเวลาขั้นสูง1ตัว
ดาวน์โหลดดีบัก: รองรับอินเทอร์เฟซ Jtag/swd Debug เพื่อดาวน์โหลดรองรับ IAP
2, RT9193: ชิปควบคุม3.3V, เอาต์พุตสูงสุดของ300mA.
คำอธิบายอินเตอร์เฟซ:
1,อินเตอร์เฟซ SWD: การสนับสนุนสำหรับการจำลองการดาวน์โหลดและการแก้ปัญหา
2,อินเทอร์เฟซ Mirco USB: แหล่งจ่ายไฟและการสื่อสาร USB ไม่สนับสนุนการดาวน์โหลด
3,อินเตอร์เฟซ USART1: USART1สามารถใช้ในการดาวน์โหลดโปรแกรมหรือใช้ USART1สำหรับการสื่อสาร
4,อินเทอร์เฟซ MCU Pin: นำพินพอร์ต I/o ทั้งหมดและง่ายต่อการเชื่อมต่อกับอุปกรณ์ต่อพ่วง
5, 5V และ3.3V อินพุตและเอาต์พุตอินเทอร์เฟซ: ใช้กันทั่วไปในแหล่งจ่ายไฟภายนอกหรือกับโมดูลอื่นๆสำหรับการรักษาพื้นดินทั่วไป
คำอธิบายอุปกรณ์อื่นๆ:
1,ไฟ LED (PWR): สถานะไฟแสดงสถานะสามารถตรวจสอบได้ว่าแหล่งจ่ายไฟมีเสถียรภาพหรือไม่
2,ผู้ใช้ LED (PC13): เพื่ออำนวยความสะดวกในการทดสอบเอาท์พุท I/o หรือระบุโปรแกรมทำงาน
3,เริ่มกระโดดเลือกโหมดการเขียนโปรแกรม: (1,หน่วยความจำแฟลชของผู้ใช้2, SRAM 3,หน่วยความจำระบบ)
4,ปุ่มรีเซ็ต: รีเซ็ตชิปสำหรับโปรแกรมผู้ใช้
5, 8M คริสตัล: ความถี่สามารถตั้งค่าเพื่อให้ระบบโอเวอร์คล็อกที่72MHz.
6,32.คริสตัล768KHz: มีให้สำหรับ RTC ในตัวหรือสำหรับการสอบเทียบ
STM32F103C8T6 VSSTM32F103C6T6
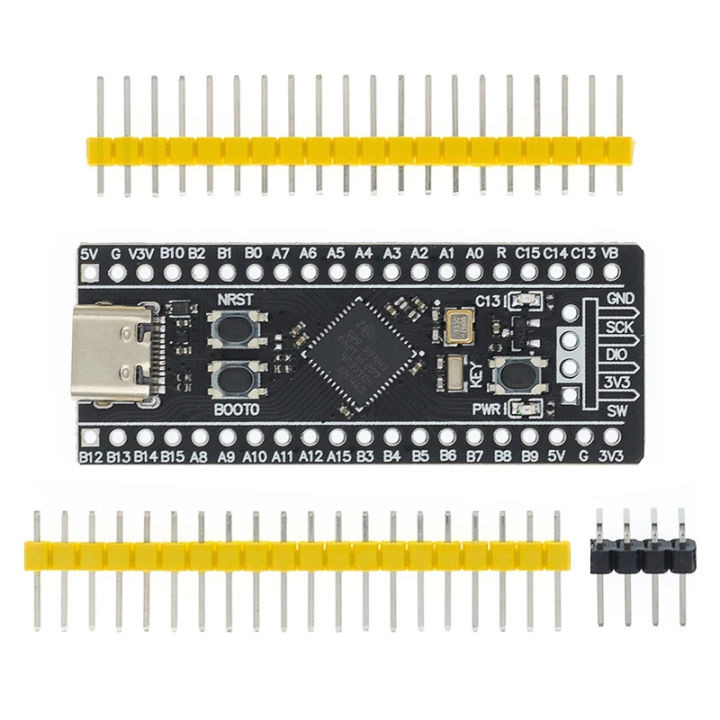
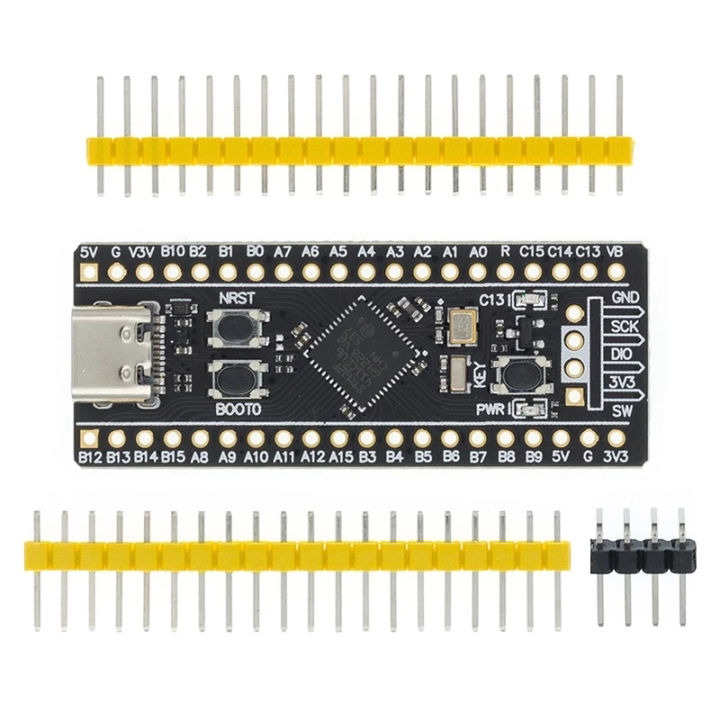
บอร์ดพัฒนา STM32F401CCU6 3.0/STM32F411CEU6 3.0
V3.0บอร์ดหลักของ STM32F401CCU6
ฟรีคิว84Mhz ROM:256KB RAM:64KB
V3.0บอร์ดหลักของ STM32F411CEU6
ฟรีคิว100MHZ ROM:512KB RAM:128KB
สนับสนุนการเขียนโปรแกรม MicroPython ให้เฟิร์มแวร์ MicroPython ที่มีอยู่ดูลิงค์สำหรับไฟล์การกำหนดค่าแต่ไม่ได้ให้คำตอบทางเทคนิค!
รองรับการเขียนโปรแกรม Arduino ดู https://github.com/stm32duino/Arduino_Core_STM32 Github สำหรับรายละเอียด
บอร์ดที่มีเวอร์ชัน V1.3ขึ้นไปมี3ปุ่มปุ่มรีเซ็ตปุ่ม BOOT0และปุ่มผู้ใช้
วิธีเข้าสู่โหมด ISP
วิธีที่1: กดปุ่ม TheBOOT0ค้างไว้และปุ่มรีเซ็ตภายใต้สถานะเปิดเครื่องจากนั้นปล่อยปุ่มรีเซ็ตและปล่อยปุ่ม BOOT0หลังจาก0.5วินาที
วิธีที่2: กดปุ่ม BOOT0ค้างไว้เมื่อปิดเครื่องและปล่อยคีย์ BOOT0 0.5S หลังจากเปิดเครื่อง
โหมด DFU: เพียงใช้สายเคเบิลข้อมูลเพื่อเชื่อมต่อกับคอมพิวเตอร์หากมีปัญหาไม่รู้จักคุณสามารถอุ่นชิปได้อย่างถูกต้อง (25 ° C) จากนั้นเข้าสู่โหมด ISP อีกครั้ง
โหมดพอร์ตอนุกรม: ใช้ USB กับพอร์ตอนุกรมเพื่อเชื่อมต่อ PA9และ PA10ของบอร์ดหลัก
ไม่จำเป็นต้องใช้ USB กับพอร์ตอนุกรมไม่มีดีบักเกอร์ไม่มีไดรเวอร์คอมพิวเตอร์เพียง TYPE-C สายเคเบิลข้อมูลเพื่อให้การดาวน์โหลดเฟิร์มแวร์เสร็จสมบูรณ์
กดค้างไว้ ปุ่มคีย์ปุ่ม คลิกที่ ปุ่มรีเซ็ตไฟ LED C13 กะพริบปล่อย ปุ่มคีย์ปุ่ม เพื่อเข้าสู่
Core Board 128KB RAM 512KB ROM
1.ออสซิลเลเตอร์คริสตัลความเร็วสูง25MHZ และออสซิลเลเตอร์คริสตัลความเร็วต่ำ6PF 32.768Khz
2.แผ่นแฟลชสงวนไว้ให้ USBDisk & FATFFS เป็นประจำ
3.หมวกจัมเปอร์สามารถใช้งานได้โดยตรงโดยไม่ต้องติดตั้ง BOOT0ดึงลงความต้านทานภายใน10K
4.โรงงานได้เผาโคมไฟหายใจและ USBCDC ขั้นตอนการทดสอบ
5.จัดเตรียมเฟิร์มแวร์ MicroPython ที่มีอยู่ไฟล์การกำหนดค่า
6.ปรับทิศทางของหมวกกระโดดถ้าไม่สามารถติดตั้งได้เนื่องจากหมวกกระโดดกว้างด้านหนึ่งและแคบอีกด้านหนึ่ง
7.บอร์ด V1.3มี3ปุ่ม: รีเซ็ตคีย์คีย์ BOOT0และปุ่มผู้ใช้
V1.3ดาวน์โหลดแบบอนุกรมและดาวน์โหลด DFU: เชื่อมต่อกับ PA9และ PA10 (เชื่อมต่อกับ Usb ในโหมด DFU) โดยกดปุ่ม BOOT0และปุ่มรีเซ็ตจากนั้นปล่อยปุ่มรีเซ็ตหลังจาก0.5วินาทีให้ปล่อยปุ่ม BOOT0เพื่อเข้าสู่การดาวน์โหลดแบบอนุกรมหรือดาวน์โหลด DFU ซอฟต์แวร์ที่เกี่ยวข้องคือ Flymcu หรือ CubeProg
ดาวน์โหลดเวอร์ชัน Jump Cap: BOOT0เชื่อมต่อกับ High BOOT1เชื่อมต่อกับ High ป้อนพอร์ตอนุกรมเพื่อดาวน์โหลดหรือดาวน์โหลด DFU ซอฟต์แวร์จะเหมือนกับด้านบน



































![[จํานวนมาก ราคาเยี่ยม] เครื่องทดสอบโปรแกรมดาวน์โหลด J-Link OB ARM SWD STM32 v8](https://down-th.img.susercontent.com/file/sg-11134201-7qvg3-lgduh43rgaja98_tn)
![St-link V2 โปรแกรมดาวน์โหลดจําลอง ขนาดเล็ก STM8/STM32 พร้อมฝาครอบ [Didays.th]](https://down-th.img.susercontent.com/file/sg-11134201-7qvd1-lki020zkvm2hdb_tn)
![[Dcline.th] St-link V2 โปรแกรมดาวน์โหลดจําลอง ขนาดเล็ก STM8/STM32 พร้อมฝาครอบ](https://down-th.img.susercontent.com/file/sg-11134201-7rbnc-llegkrsju3w4fb_tn)