ข้อมูลทางเทคนิค
DSR เป็นตัวควบคุมแรงดันไฟฟ้าสำหรับเครื่องกำเนิดไฟฟ้าแบบซิงโครนัสซึ่งออกแบบมาสำหรับการทำงานและการปรับเทียบปฏิบัติการแบบเดี่ยวเพื่อเพิ่มประสิทธิภาพการทำงานเครื่องควบคุมควรเข้าใจว่าเป็นส่วนหนึ่งของระบบที่ประกอบด้วยส่วนประกอบอย่างน้อยสามส่วน: DSR (หน่วยควบคุม), โมดูลการสื่อสาร (ตัวอย่างเช่น DI1) และหน่วยกำกับดูแล ดังแสดงในรูปที่4หรือ12.
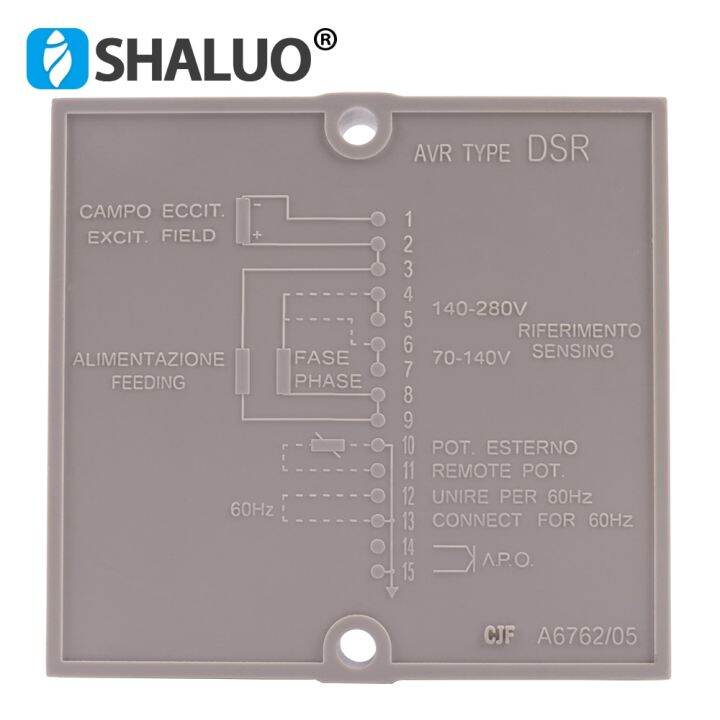
ตัวเชื่อมต่อสำหรับเชื่อมต่อกับและจากเครื่องกำเนิดไฟฟ้าและโมดูลการสื่อสารจะอยู่บนแผงควบคุม dsr.
หน่วยการกำกับดูแลสามารถประกอบขึ้นจากคอมพิวเตอร์ส่วนบุคคลอุปกรณ์ “synoptic” อีกตัวหนึ่งหรือทั้งสองอย่างมันไม่มีฟังก์ชันในการควบคุมระบบแบบเรียลไทม์แต่อนุญาตให้โปรแกรมและการสร้างภาพของพารามิเตอร์การดำเนินงานทั้งหมดของ dsr.
ถ้ามันมีการติดตั้งอินเทอร์เฟซแบบอนุกรม RS485หรือ RS232โมดูลการสื่อสาร DI1เป็นสิ่งจำเป็นสำหรับการเชื่อมต่อ
คุณสมบัติ
• ดิจิตอลเต็มรูปแบบควบคุมขึ้นอยู่กับ DSP
• การติดตั้งบนเครื่อง
• เหมาะสำหรับอัลเทอร์เนเตอร์ที่มีการควบคุมตนเองทั้งหมด
• การจ่ายแรงดันไฟฟ้า: 40Vac ÷ 270Vac (จากขดลวดเสริมแรงดันเอาต์พุตหรือ pmg)
• ช่วงความถี่: 12Hz ÷ 72Hz
•“ การรับรู้ ”ของแรงดันไฟฟ้าที่มี RMS จริงหรือการวัดโดยเฉลี่ย (70 ÷ 280 VAC)
• กระแสไฟขาออกต่อเนื่องสูงสุด: 4Adc;
• ความแม่นยำในการควบคุมแรงดันไฟฟ้า: ± 1% ตั้งแต่ไม่มีโหลดไปจนถึงโหลดน้อยในสภาพคงที่โดยปัจจัยด้านพลังงานและสำหรับการเปลี่ยนแปลงความถี่ตั้งแต่-5% ถึง + 20% ของค่าเล็กน้อย
• พลังงานลดลงชั่วคราวและแรงดันไฟฟ้าเกินภายใน ± 15%
• เวลาการกู้คืนแรงดันไฟฟ้าภายใน ± 3% ของชุดค่าในเวลาน้อยกว่า300 msec.
• แรงดันไฟฟ้าเกินชั่วคราวระหว่างเริ่มขึ้น: น้อยกว่า5% ของแรงดันไฟฟ้า
• ระบบสัมผัสเฟสเดียว
• พารามิเตอร์: โวลต์แทงแอมป์และ Hz สามารถตั้งค่าได้ด้วยเครื่องตัดแต่ง (ค่าเริ่มต้น) 50/60Hz ผ่าน A
“จัมเปอร์” (ค่าเริ่มต้น); พารามิเตอร์ทั้งหมดสามารถตั้งโปรแกรมได้ผ่านซอฟต์แวร์
• การควบคุมระยะไกลแบบอะนาล็อกของแรงดันไฟฟ้าขาออกสามารถทำได้ผ่านแรงดันไฟฟ้าภายนอก (0 ÷ 2,5Vdc) หรือด้วยโพเทนชิโอมิเตอร์เชิงเส้น10 kohm.
• อุณหภูมิสิ่งแวดล้อม: -25 °C ÷ + 70 °C
• การป้องกันความเร็วต่ำโดยปรับธรณีประตูและความลาดชันได้
• สัญญาณเตือนแรงดันไฟฟ้าเกินและแรงดันไฟฟ้าเกิน
• ป้องกันกระแสไฟเกินกระตุ้นด้วยการแทรกแซงล่าช้า
• การจัดการการลัดวงจรชั่วคราว (เริ่มขึ้นของมอเตอร์แบบอะซิงโครนัส)
• เอาต์พุตแบบ Open Collector (ไม่ใช่ฉนวน) การแทรกแซงการส่งสัญญาณของอุปกรณ์ป้องกัน (ฉนวนกันความร้อนบนโมดูล DI1เสริม) ด้วยการเปิดใช้งานโปรแกรมที่เกี่ยวข้องกับสัญญาณเตือนของแต่ละบุคคลและความเป็นไปได้ที่จะชะลอการแทรกแซง
• การจัดเก็บในสภาพการทำงานที่ผิดปกติ (ประเภทของการเตือนจำนวนเหตุการณ์ระยะเวลาของเหตุการณ์ล่าสุดรวมเวลา)
• การท่องจำเวลาการทำงานของเครื่องควบคุม (เริ่มจากการแก้ไข11ของเฟิร์มแวร์)
• อินเตอร์เฟซการสื่อสารแบบอนุกรม RS232และ RS485 (พร้อมโมดูล DI1ตัวเลือก)
คำเตือน: การทำงานของ DSR Not Specified ต่ำกว่า12Hz.