8M ตั้งแต่ระยะทางพลังงานต่ำขนาดกะทัดรัดรวมง่าย
ประสิทธิภาพการทำงานของ | |||
ระยะห่างตั้งแต่ | 0.2 ~ 8.0M @ 90% การสะท้อนแสง (ในร่ม0Klux) | ความถูกต้องของ | ± 6ซม. @(0.2 ~ 3ม.) |
อัตราเฟรม | UART: 1 ~ 250Hz (ปรับค่าเริ่มต้น100Hz) | ความละเอียดระยะทาง | 1ซม. ค่ะ |
ความต้านทานแสงโดยรอบ | 70Klux | อุณหภูมิในการทำงาน | -10 ~ 60 ℃ |
พารามิเตอร์ทางแสง | |||
แหล่งกำเนิดแสง | วีซีเซล | ความยาวคลื่นกลาง | 850nm |
ความปลอดภัยของดวงตา | Class1 (IEC60825) | มุมมองภาพ | 2 ° |
พารามิเตอร์ทางไฟฟ้า | |||
แหล่งจ่ายไฟฟ้า | 3.7 ~ 5.2โวลต์ | กระแสเฉลี่ยปัจจุบัน | ≤ 70mA |
พาวเวอร์ | ≤ 0.35วัตต์ | กระแสสูงสุดในปัจจุบัน | 150mA |
ระดับการสื่อสาร | LVTTL (3.3V) | อินเตอร์เฟซการสื่อสาร | UART, I2C,I/o |
อื่นๆอีกมากมาย | |||
มิติข้อมูล | 35.00 × 21.25 × 13.50มม. | กรณีวัสดุ | เอบีเอส/พีซี |
อุณหภูมิในการจัดเก็บ | -20 ~ 75 ℃ | น้ำหนักตัวเครื่อง | <5g |
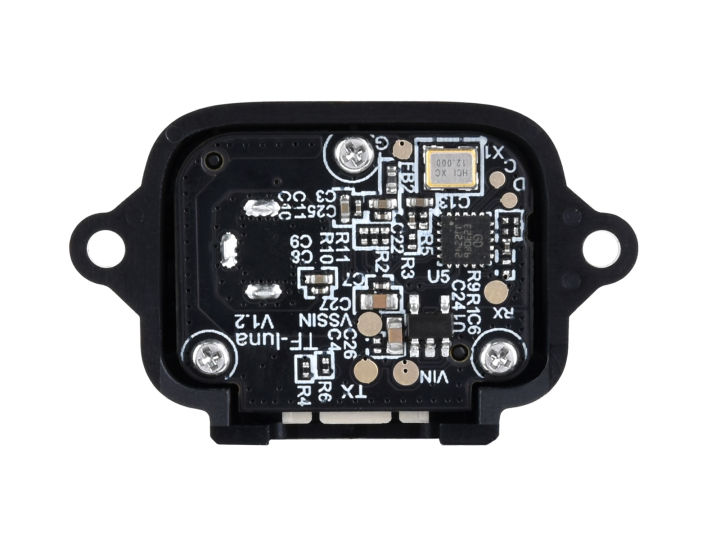
TF-Luna เป็น Lidar ที่มีจุดเดียวตามหลักการ TOF ที่มีเอกลักษณ์เฉพาะตัว
การออกแบบออปติคัลและไฟฟ้าสามารถบรรลุความเสถียรแม่นยำและมีความไวสูง
การวัดระยะทาง
อัลกอริธึมแบบปรับได้หลายแบบในตัวการกำหนดค่าและพารามิเตอร์ที่ปรับได้หลายแบบมีคุณสมบัติที่ยอดเยี่ยมในสภาพแวดล้อมที่ซับซ้อนและสามารถตอบสนองความต้องการใช้งานได้มากขึ้น

มีความเสถียรสูงความแม่นยำสูงและประสิทธิภาพความไวสูง
ในระยะสั้น0.2M ~ 8M

Adopts การออกแบบโครงสร้างที่กะทัดรัดที่มีขนาดเล็กและการใช้พลังงานที่ต่ำกว่าสามารถฝังอยู่ภายในหุ่นยนต์เพื่อลดขนาดโดยรวมและปรับปรุง Passability ของมัน

การใช้พลังงาน ≤ 0.35W ซึ่งเหมาะสำหรับการใช้งานแบตเตอรี่หรือพลังงานต่ำ

สำหรับใช้กับบอร์ดควบคุมเช่น Raspberry Pi/raspberry Pi Pico./ESP32 /Arduino

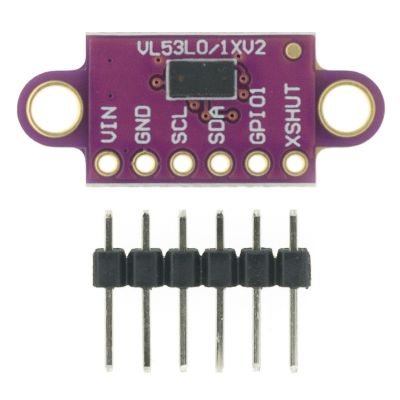
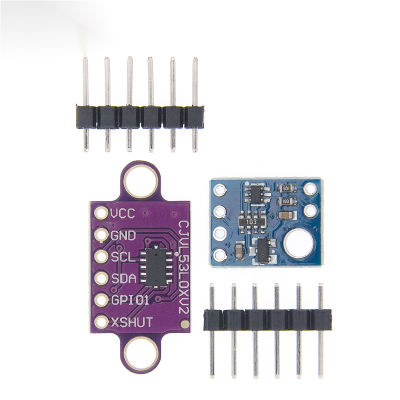
หมายเลขหมายเลข | ฟังก์ชันการทำงานของ | คำอธิบายของภาพ |
1 | 5V ค่ะ | แหล่งจ่ายไฟฟ้า |
2 | RXD/SDA | ข้อมูล UART Rx/ I2C |
3 | TXD/SCL | นาฬิกา UART Tx/ I2C |
4 | GND สำหรับ | ground |
5 | อินพุตการกำหนดค่า | โหมด I2C: กราวด์ |
6 | เอาต์พุตสีม่วง | โหมดเปิด/ปิด: เอาต์พุต |



* ทรัพยากรสำหรับผลิตภัณฑ์ที่แตกต่างกันอาจแตกต่างกันไปโปรดตรวจสอบหน้าวิกิพีเดียเพื่อยืนยันทรัพยากรที่ให้ไว้จริง
สินค้าที่ได้รับความนิยม | |||||
ประสิทธิภาพการทำงานของ | ระยะห่างตั้งแต่ | 0.2 ~ 8.0M @ 90% การสะท้อนแสง | 0.1 ~ 12.0M @ 90% การสะท้อนแสง | 0.1 ~ 12.0M @ 90% การสะท้อนแสง | 0.1 ~ 12.0M @ 90% การสะท้อนแสง |
อัตราเฟรม | 1 ~ 250Hz (UART) | 1 ~ 1000Hz (UART) | 1 ~ 1000Hz (UART) | 1 ~ 40เฮิร์ต | |
ความละเอียดระยะทาง | 1ซม. ค่ะ | ||||
ความถูกต้องของ | ± 6ซม. @(0.2ม. ~ 3.0ม.) | ± 6ซม. @(0.1ม. ~ 6.0ม.) | ± 5ซม. @(0.1ม. ~ 5.0ม.) | ± 6ซม. @(0.1ม. ~ 6.0ม.) | |
อุปกรณ์ออปติคอล | มุมมองภาพ | 2 ° | 3.6 ° | 2 ° | |
การสื่อสารระหว่างกัน | ข้อมูลเอาท์พุท | ค่าระยะทางจุดเดียว | |||
การสื่อสารระหว่างกัน | UART, I2C,I/o | RS485 | |||
เครื่องกล/เครื่องกล | แหล่งจ่ายไฟฟ้า | 3.7โวลต์ ~ 5.2โวลต์ | ± 5V 0.1V | ± 5V 0.5V | 7โวลต์ ~ 30โวลต์ |
พาวเวอร์ | ≤ 0.35วัตต์ | ≤ 0.70วัตต์ | 550MW | ≤ 0.80W @ 12V | |
มิติข้อมูล | 35.00 × 21.25 × 13.50มม. | 42.00 × 15.00 × 16.00มม. | 35.00 × 18.50 × 21.00มม. | 50.00 × 34.00 × 41.00มม. | |
น้ำหนักตัวเครื่อง | <5g | 5G ± 0.3G | ± 12G 1G | 52G ค่ะ | |
เนื้อหาในบรรจุภัณฑ์
น้ำหนัก:0.013กิโลกรัมค่ะ
TF-Luna LiDAR Range Sensor X1




















![[Antushop]เลเซอร์ PEASKPULSE เครื่องวัดเมตร600ม.,เลเซอร์เลเซอร์วัดระยะง่ายต่อการพกพา W600G สีขาวสำหรับล่าและกอล์ฟ](https://lzd-img-global.slatic.net/collect/ae/kf/H3fae070c82a743aa9f38b2a636974305o.jpg_400x400q80.jpg)