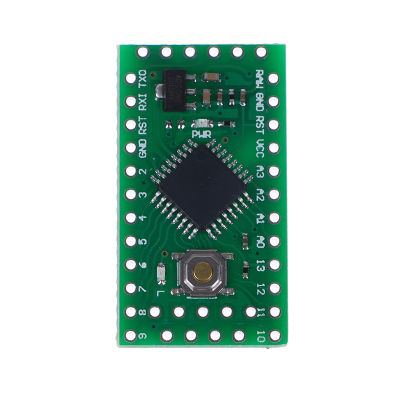
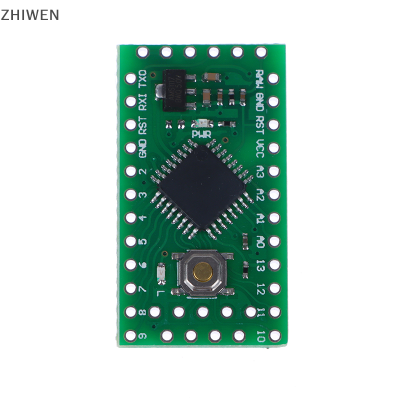
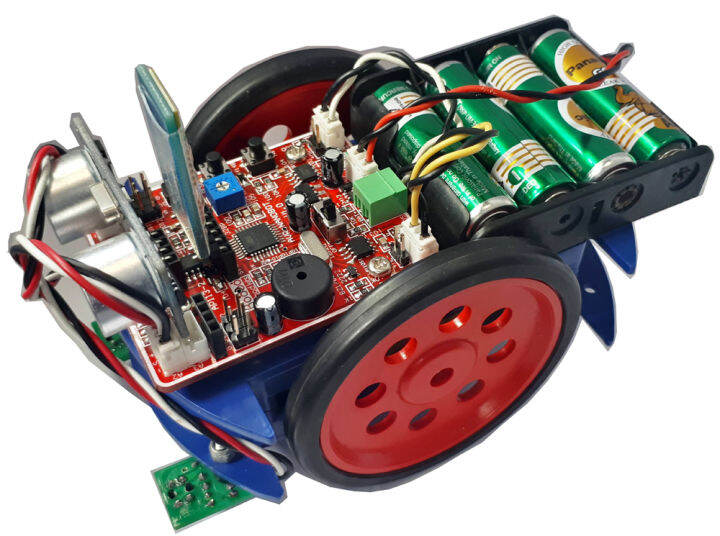
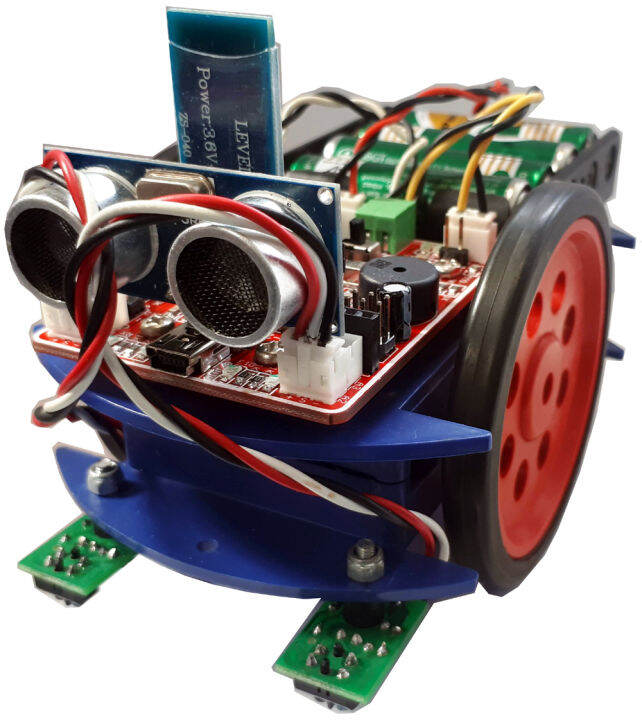
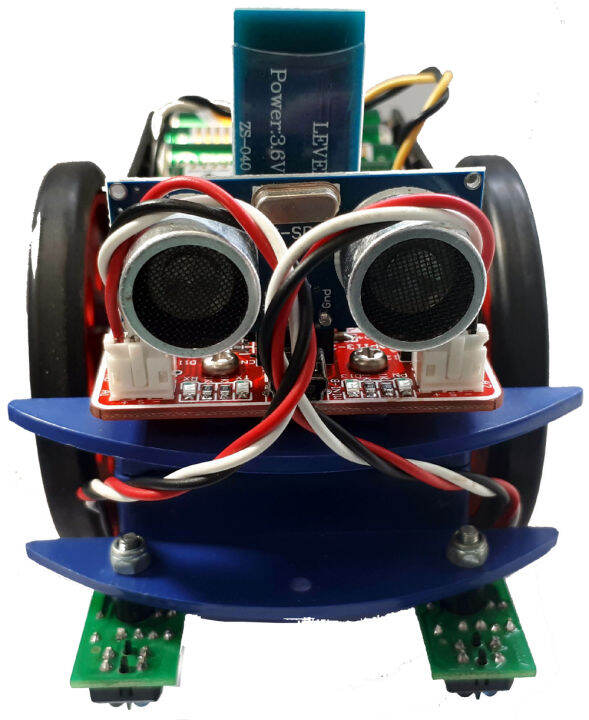
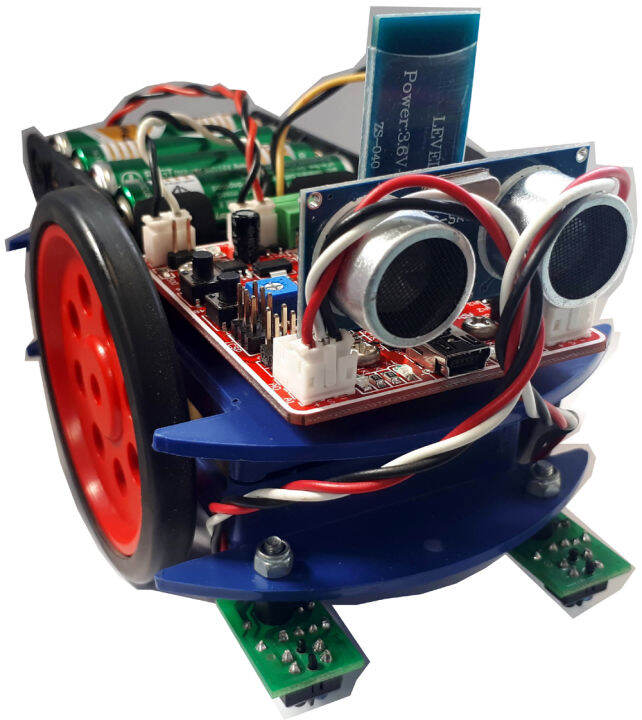
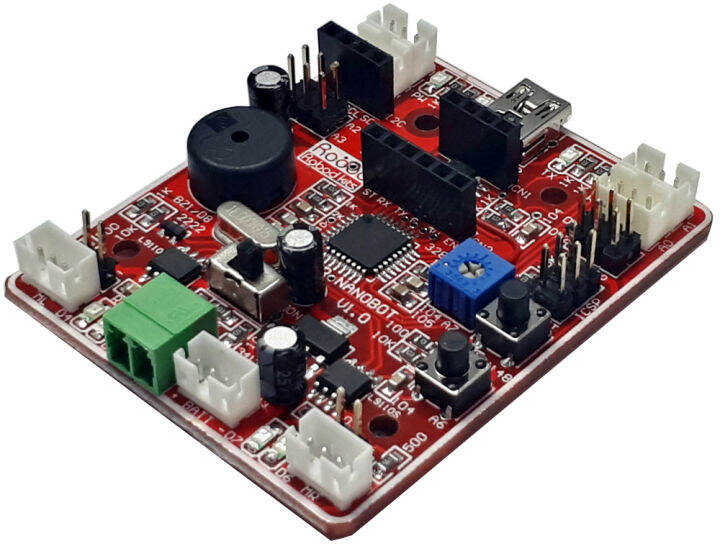
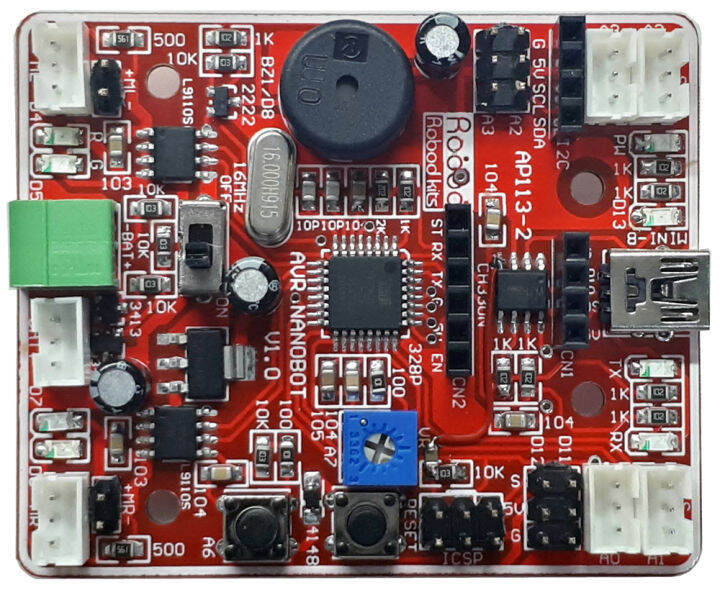
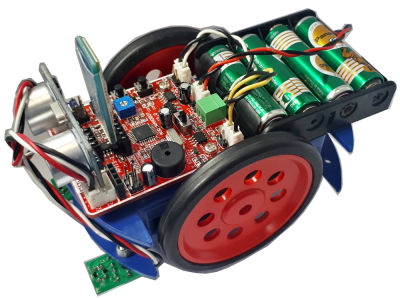
หุ่นยนต์ AVR NANOBOT เป็นหุ่นยนต์ที่พัฒนาต่อจาก Built-in programmer AP113 รุ่นแรก เขียนโปรแกรมภาษา C ในตระกูล AVR กับ Arduino สามารถเขียนให้หุ่นยนต์ เดินหน้า ถอยหลัง เลี้ยวซ้าย เลี้ยวขวา เดินตามเส้น และสามารถต่อกับโมดูล Ultrasonic HC-SR04 และBlutooth HC-05, 06 ได้โดยที่บนบอร์ดได้ ออกแบบจุดต่อไว้ให้ด้วย แถมยังต่อกับจอ OLED 0.91 inch 128x32 I2C SSD1306 ยังต่อกับ motor servo ได้ถึง 2 ตัว สำหรับทำมือจับต่อเซ็นเซอร์อินฟราเรดได้มากถึง 4 จุด และมีตัวอย่างโปรแกรมตัวอย่างสำหรับทดลองให้มากมาย
รายละเอียดของ AVR NANOBOT
ไมโครคอนโทรลเลอร์ | ATmega328 |
แหล่งจ่ายไฟ | AA 1.5Vx4 มาตรฐาน |
Connector Power 2 Pin | 6 – 9 Vdc |
Flash Memory | 32 KB |
SRAM | 2 KB |
EEPROM | 1 KB |
Clock Speed | 16Mhz |
Motor Drive on board | 2 |
Sensor Infrared | 2 เพิ่มได้อีก 2 |
รองรับการต่อ Servo | 2 ไม่มีในชุด |
Buzzer on board | 1 |
A to D test on board | 1 |
Switch Test on board | 1 |
Switch Reset on board | 1 |
รองรับการต่อ Ultrasonic | 1 |
รองรับการต่อ Bluetooth | 1 |
รองรับการต่อ I2C LCD Display | 1 ไม่มีในชุด |